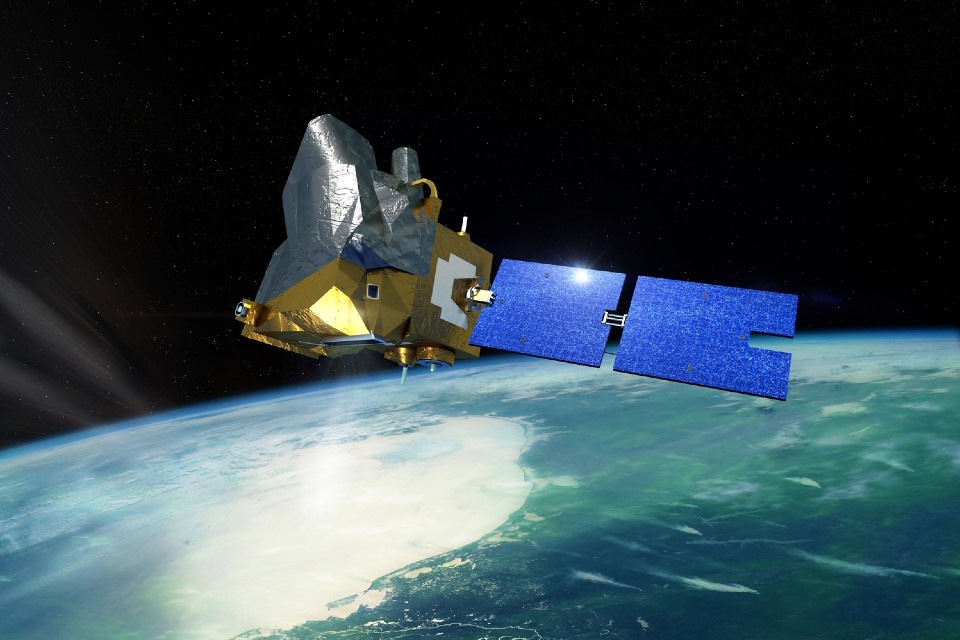
Astrium's ATV-3 Edoardo Amaldi docks with ISS

Above: ATV - Automated Transfer Vehicle (ATV) close to docking with the ISS. © Astrium / Silicon World
Astrium, Europe’s leading space company, is the prime contractor for the development and construction of the cargo spacecraft. Alain Charmeau, CEO of Astrium Space Transportation said: “Achieving a rendezvous in space for the third time is a huge success for all our teams as it uses one of the most cutting-edge technologies that Astrium has developed as system integrator for ATV.

“The ATV’s innovative technologies make ATV the unique European space vehicle being at the same time an orbital vehicle capable of rendezvous and docking, and an integral module of the station – in short the most intelligent space robot currently available. Of course, we are currently studying new evolutions for the automated transfer vehicle on behalf of ESA, the European Space Agency, in order to maintain and develop Europe’s amazing space technologies.”

Above: ATV - Automated Transfer Vehicle (ATV) approaching the ISS. © Astrium / image Silicon Worlds - image terre: courtesy NASA / 2007
Another two ATVs will have delivered supplies to the ISS by 2014. Following the retirement of the US Space Shuttle, ATV is now the largest supply vehicle for the ISS.
Now that it has docked, the ATV can begin its mission to supply the ISS and correct the space station’s orbit. The ATV will also function as an integral, even inhabited part of the ISS.

For this third mission, the supply vehicle brings 6.6 metric tons of freight for the space station, including over 4 metric tons of fuel, water and gases. In order to enable the ISS to perform debris avoidance and reboost manoeuvers (to raise the space station’s orbit), Edoardo Amaldi will burn up to 3,150kg of fuel in up to 10 separate occasions during its mission. The ATV will also transfer 860 kg of propellant to the ISS Russian Segment propulsi 'fluid' cargo, while everyday necessities, experiments, spare parts and care packages from the astronauts’ families make up a further 2.2 metric tons of the payload. The astronauts will gradually unload this cargo over the six-month period that the ATV remains docked to the ISS.
ATV-3 Edoardo Amaldi’s mission will last until the end of the summer. At the same time as it is gradually unloaded, the ATV will also be loaded with items no longer needed on board the ISS. The supply vehicle’s controlled re-entry will take place over the southern Pacific Ocean. By then Edoardo Amaldi will have travelled some four million kilometres in total.
Edoardo Amaldi docked with the Russian station module 'Zvezda'. The safety of the crew and the space station is the number one priority during the automated docking sequence with the ISS. The autonomous, intelligent ATV safety system – developed by Astrium – ensures that in case of system anomaly, the space vehicle automatically isolates the anomaly and maintains the full functionality of the vehicle to continue its mission.
In the unlikely case of two anomalies, ATV is able to perform a manoeuver that removes ATV from the station’s vicinity, and 'parks' the ATV at an appropriate distance from the ISS. ATV has this capability whatever the situation to ensure the safety of the space station. After system verification, a new approach can then be initiated. During the rendezvous, in addition to the ATV’s onboard systems, operations are constantly monitored by the ATV Control Centre (operated from CNES space centre in Toulouse) and the ISS Ground Control Centre. The ISS crew also monitors the final approach of the vehicle thanks to a video camera and can, as a last resort, abort the rendezvous operations by directly commanding the ATV to move away from ISS.
The ATV’s automated rendezvous and docking phase began at some 30 kilometers from the ISS and 5 kilometers below when ATV systems established precisely its relative position and velocity with respect to the ISS. The first automated rendezvous maneuvers, computed and executed by ATV on its own, brought the vehicle to a ‘hold’ position 3500 meters behind the ISS. After authorisation from the ground, ATV went automatically to the next hold point, at a distance of 250 meters. At this point, the ATV system switched to relative guidance, navigation and control mode (GNC) using its optical sensors and locks on the ISS. After authorisation by the ATV control centre, the ATV continued its approach up to the hold position at 20 meters from the ISS; it then began also to control its attitude in relation to that of the ISS, in the approach that took it to 12 meters. Following a last 'go' from the ATV control center, jointly agreed with the ISS crew and ISS ground control centres, Edoardo Amaldi covered the last few metres to the ISS docking port at a relative maximum speed of not more than 10 centimetres per second.
The axis of ATV’s extended docking probe, the head of which has a diameter of about 15 centimetres was brought into contact with the docking port of the Russian 'Zvezda' module with an accuracy of less than 10 centimetres. The docking port is a passive cone which has a diameter of 90 centimetres. As soon as first contact is made, the ATV docking head locked with ISS docking port. ATV then executed an automated sequence that set-up all electrical, mechanical and fluid connections with the ISS.
After equalisation of pressures between ATV and the ISS, the ISS hatch will be opened by the ISS crew, who then open the ATV’s pressurised module hatch (diameter about 80 centimetres); from then on the ATV pressurizsed module will form an extension of the ISS inhabited environment, and the European space vehicle will be an integral part of the ISS.